Caratteristiche Base delle Navette AGV a guida ottica / odometrica
- Le velocità sono definibili in modo diverso per ogni tratto delle missioni;
- La durata delle soste a tempo è definibile;
- E’ possibile gestire le ripartenze comandate dall’operatore;
- E’ possibile programmare la rotazione della navetta su se stessa per riprendere il medesimo percorso a ritroso;
- E’ possibile disporre del carico o scarico automatico degli elementi trasportati;
- E’ possibile programmare lo sgancio o riaggancio dei carrelli (riaggancio possibile solo in specifici casi) per navette trattore;
- E’ possibile definire dei tempi di attesa in corrispondenza di incroci con altri AGV o altri mezzi di movimentazione interna;
- I tracciati sono suddivisibili in aree operative, ciò rende possibile interdire l’accesso ad altri AGV se costituiscono ostacolo;
- E’ possibile eseguire missioni diverse programmabili anche con esecuzione in sequenza;
- E’ possibile memorizzare fino a 22 missioni diverse, selezionabili attraverso il numero;
- Le missioni da compiere possono essere selezionabili anche attraverso un selettore;
- Le destinazioni possono essere modificabili tramite le stazioni di chiamata remota;
- Da bordo è possibile visualizzare lo stato di carica delle batterie.
Il software fornito con i Veicoli a guida automatica o AGV a guida Ottica o Odometrica è aperto, pertanto il cliente ha la possibilità di modificare in modo autonomo il programma di ogni missione, o programmare varianti o nuove missioni secondo mutate necessità di lavoro.
Programmazione delle missioni per navette a guida ottica
La programmazione delle missioni è eseguibile da personale privo di specifica conoscenza di programmazione che agirà su due elementi di base:
- La lunghezza dei singoli tratti di tracciato;
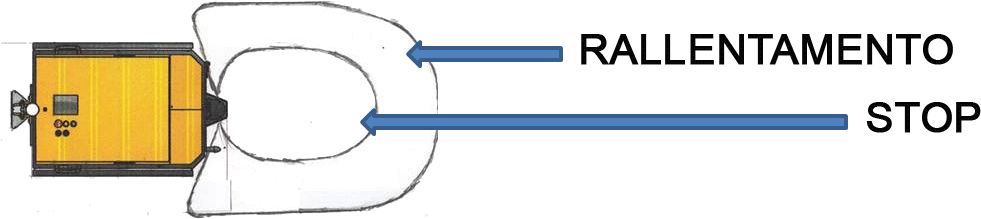
- La posizione dei punti di rallentamento e/o di fermata.
Questi due elementi di base possono essere rilevati anche facendo percorrere all’AGV la missione di interesse utilizzando i comandi manuali.
SISTEMA DI CONTROLLO
Gli AGV sono gestiti da un sistema Motion Control a rapida accensione, ed a bordo è presente un terminale operatore posto in posizione ergonomica.
Gli AGV a guida ottica ed odometrica per funzionare non necessitano di collegamenti con il mondo esterno, possono anche essere immessi su tracciati condivisi con missioni o mezzi differenti, sono in grado di gestire autonomamente le precedenze nell’esecuzione delle missioni.
Le navette AGV consentono di memorizzare a bordo programmi di lavoro diversi per eseguire missioni / funzioni differenti su tracciati diversi; le missioni possono essere programmabili per l’esecuzione in sequenza.
Gli AGV possono essere gestiti anche mediante un PC Supervisore collegato in Wi-Fi che avrà le funzioni di SISTEMA DI GESTIONE DEI FLUSSI DI PRODUZIONE E DELLE PRECEDENZE.
Il PC può permettere di visualizzare gli AGV lungo i tracciati, di utilizzare i sistemi di chiamata remota e di fornire report.
Il PC quando richiesto, potrà scambiare dati con un server aziendale per acquisire sequenze di lavorazione e/o fornire report.
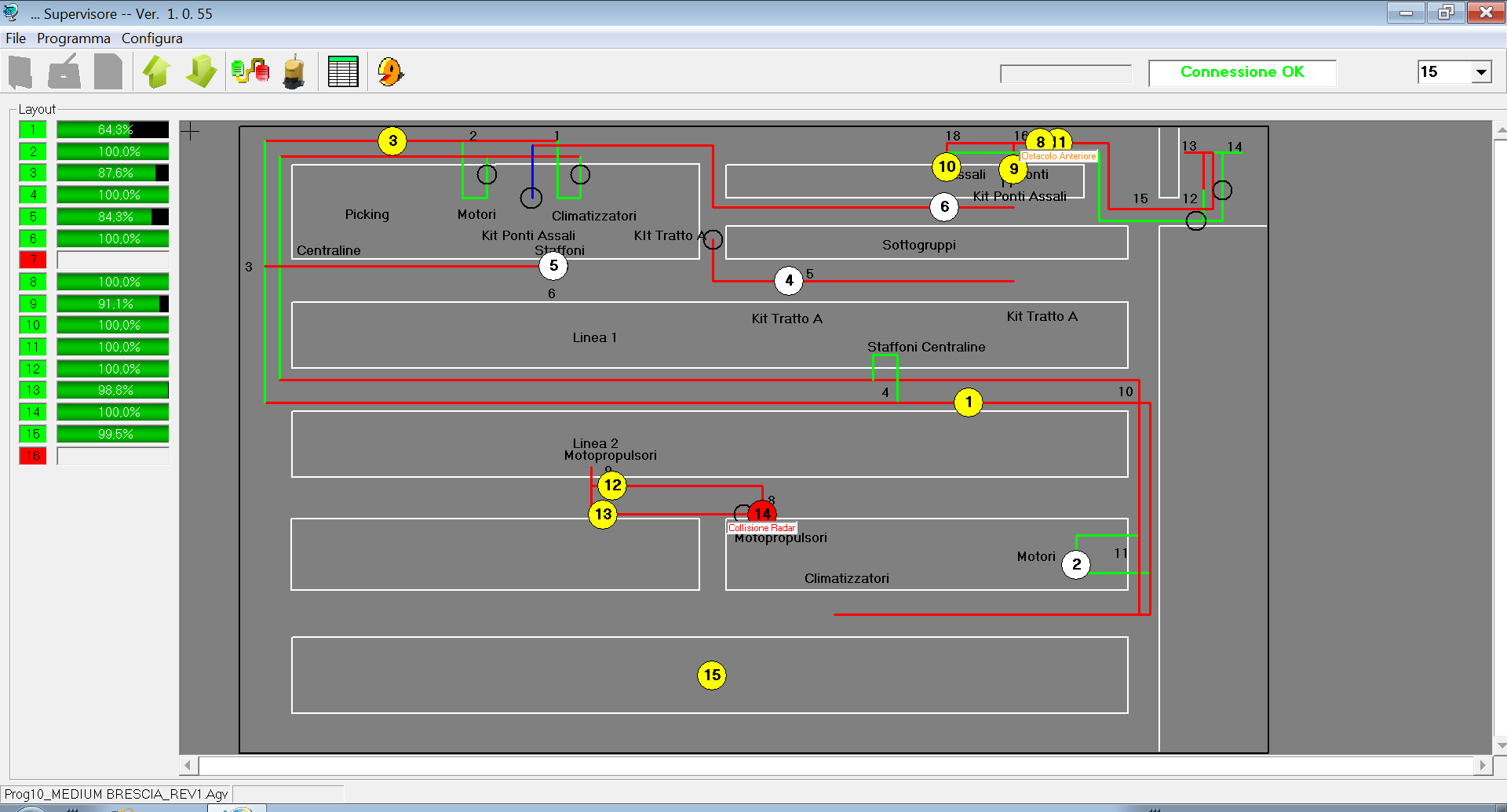
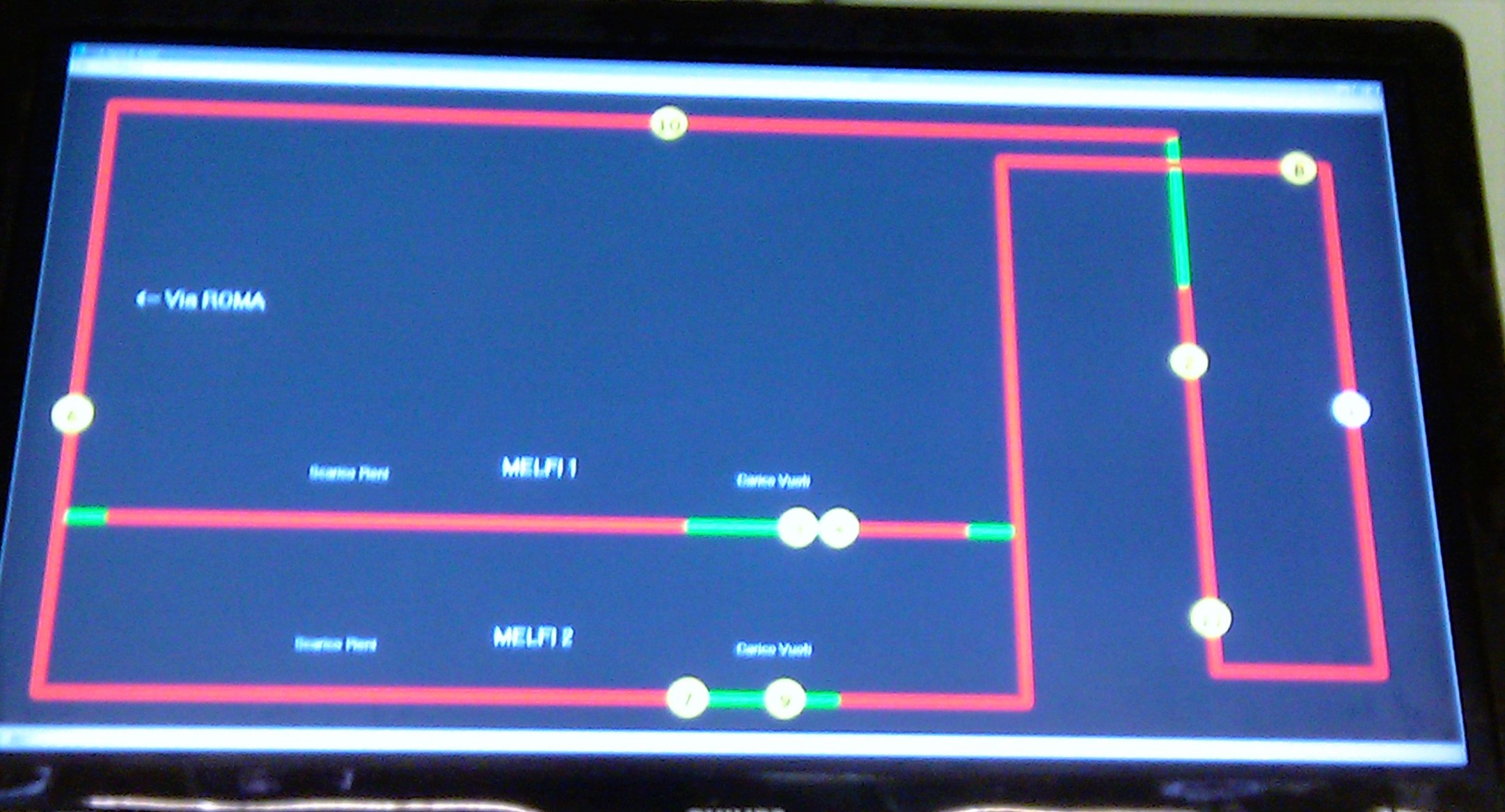
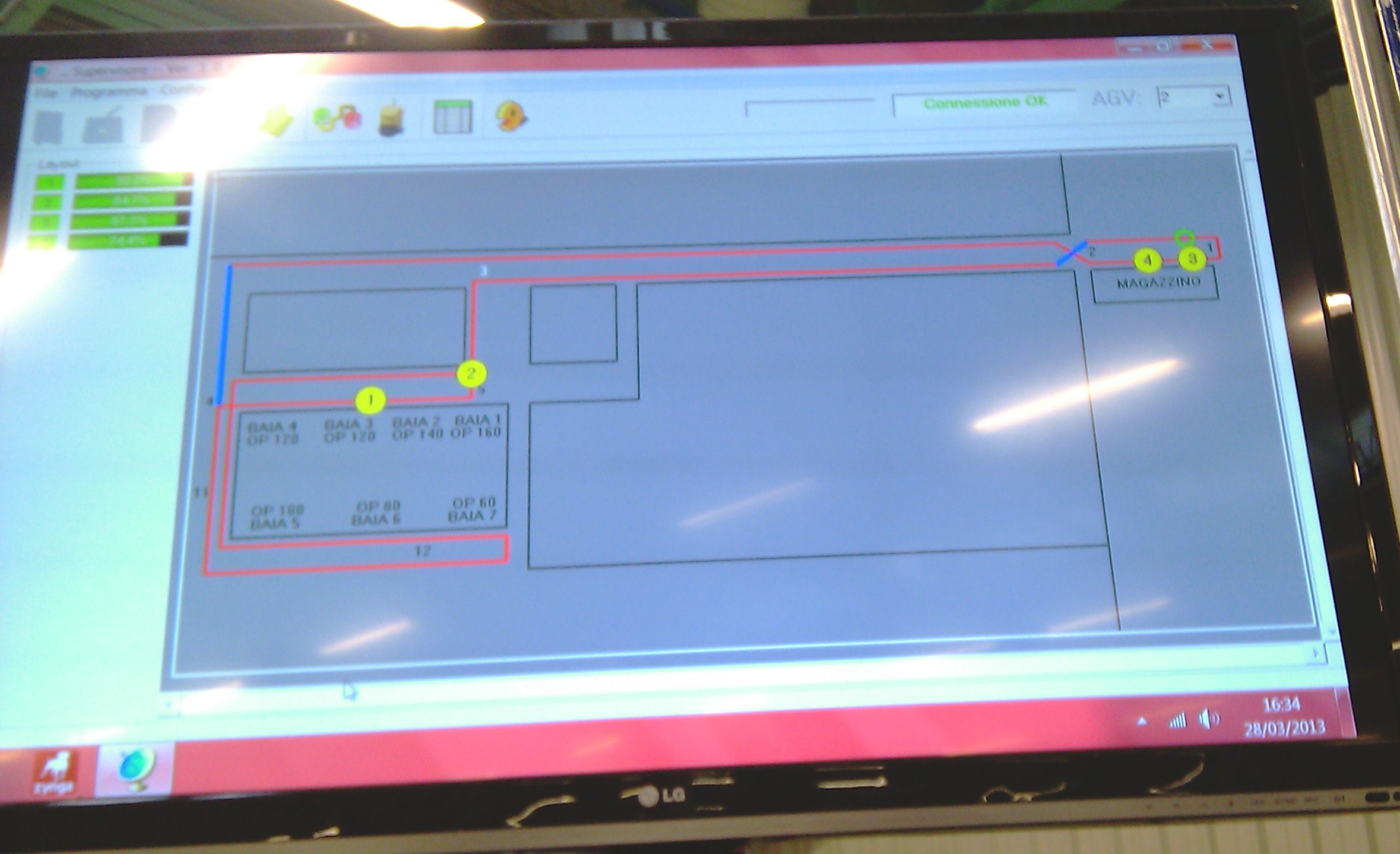
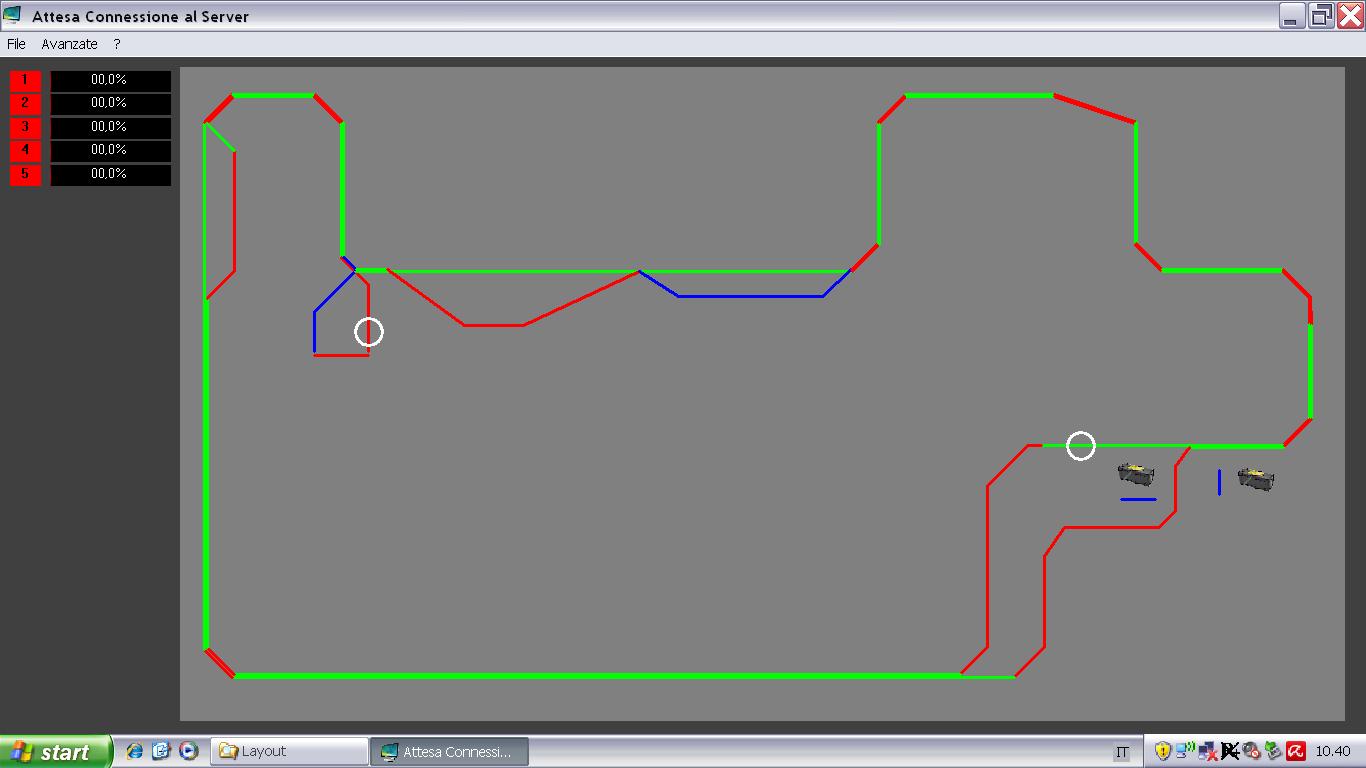
LAYOUT DELLE MISSIONI
Quando sia installato un PC Supervisore, è possibile disporre del layout delle missioni. Possono essere indicate le posizioni delle navette AGV, visualizzati eventuali allarmi e la posizione di eventuali AGV con criticità.


SOSTA E RIPARTENZA
Gestione della Sosta
La posizione di arresto degli AGV può essere determinata:
- da un sensore che rileva un riferimento a terra;
- da un encoder;
- da un cambiamento di colore della banda colorata.
I tre sistemi di gestione sono sempre tutti installati. La precisione nella ripetitività della posizione è funzione della velocità con la quale si arriva all’arresto e del metodo utilizzato per definire la sosta.
Gestione ripartenza dopo una sosta
Tutti i veicoli hanno una funzione START che permette di gestire diversamente, a secondo dell’esigenze, la ripartenza dopo una sosta:
- Mediante comando manuale;
- Mediante telecomando;
- Dopo un tempo programmabile;
- Ad ultimazione di uno scambio prodotti automatico;
- Mediante chiamata o segnale remoti.
VELOCITA' DI AVANZAMENTO
- Velocità massima: oltre 60 m/min
- La velocità è regolabile con continuità da 0 a 60 m/min
- La velocità è strettamente correlata alla specifica applicazione ed alla possibilità di ampliare, senza intercettare ostacoli, le aree di sorveglianza dello scanner di sicurezza che è programmabile.
Vuoi altre informazioni? Contatta lo Staff Tecnico!